はじめに:なぜ今、研磨の「自動化」が求められているのか
日本の製造業において、研磨工程は長らく「職人の聖域」とされてきました。しかし今、その聖域が大きな転換期を迎えています。背景にあるのは、深刻な労働力不足と技術継承の断絶です。
しかし、数千万円を投資して高性能なロボットアームを導入したにもかかわらず、「手作業の方が綺麗だった」「研磨材がすぐにボロボロになる」といった課題を抱えてしまうケースも少なくありません。
その原因の多くは、ロボットという「腕」に見合った「指先(研磨材)」を選べていないことにあります。
「職人の手」と「ロボットの腕」——決定的なメカニズムの違い
ロボット研磨を考える際、まず理解すべきは「人間とロボットでは、削り方の原理が根本的に異なる」という点です。
1-1. 人間は「違和感」を察知して微調整する

熟練工はもちろん、キャリア5年程度の作業員であっても、無意識のうちに五感をフル活用しています。
作業員が研磨中に活用している五感
👁 視覚
火花の飛び方や表面の光り具合を見て、削れ具合を判断する
👂 聴覚
研磨材が当たる音の高さで、削れ具合を判断する
✋ 触覚(振動)
手に伝わる「跳ね」や「粘り」を感じ取り、加圧・角度を0.1ミリ単位で加減する
これを「フィードバック制御」と呼びますが、人間はこれをリアルタイム、かつ高度に行っています。
1-2. ロボットは「プログラム」に忠実すぎる
一方で、一般的な産業用ロボットは、あらかじめ入力された「軌道(パス)」と「速度」を忠実に再現します。
ロボットにとって、ワーク(削る対象物)のわずかな鋳造誤差や、熱による歪みは想定外の事態です。人間なら「少し膨らんでいるな」と察知して力を抜く場面でも、ロボットは設定通りの軌道を通ろうとするため、その膨らみに激突し、深く削りすぎてしまう(過研削)のです。
ここがポイント
この「融通の利かなさ」を物理的にカバーし、ロボットに「柔軟な感覚」を与えるのが、研磨材の役割です。研磨材の選定こそが、ロボット研磨の成否を左右する最重要ファクターといえます。
ロボット研磨用研磨材に求められる「2つの役割」
ロボット研磨を成功させるためには、手作業用の研磨材とは全く異なる評価軸で製品を選定する必要があります。
① 物理的追従性(クッション性能)の確保
ロボットの硬い動きを補完するためには、研磨材自体に「しなり」や「弾力」が必要です。ワークの形状誤差や歪みを、研磨材が自ら吸収することで、過研削や削り残しを防ぎます。
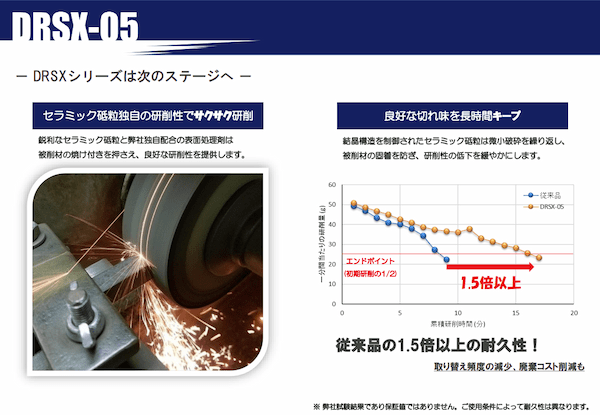
② 形状保持能力と自己発刃作用
ロボットは「研磨材の先端がここにある」という前提で動きます。土台がヘタって形が変わると計算が狂い、空振りや激突を引き起こします。また、砥粒が古くなったら自ら砕けて新しい刃先を出す「自己発刃」の性質が、常に一定の切れ味を維持するために不可欠です。
💡 セラミック砥粒が有利な理由
ロボットは「研磨材が鈍くなったから力を強くする」といった判断が苦手です。そのため、常に一定の切れ味が持続するセラミック砥粒は、ロボット研磨との相性が特に優れています。

まとめ
研磨材は単なる消耗品ではありません。ロボットが製品に触れ、形を整えるための「知覚」であり「指先」そのものです。
ロボットアームという高価な「腕」に、安価で不適合な研磨材を付けることは、一流のアスリートにサイズの合わない靴を履かせるようなものです。最適な研磨材を選び抜くことこそが、自動化投資を最短で回収し、現場での作業効率アップにつながります。
ロボット研磨用研磨材 選定の2大ポイント
✅ 物理的追従性(クッション性能)|しなり・弾力でワークの誤差を吸収する
✅ 形状保持能力と自己発刃|形状を維持しながら、常に一定の切れ味を保つ
どんな些細なお悩みでも、ぜひ私たち研磨材のプロにご相談ください。現場の苦労を知る営業担当と技術スタッフが一体となって、貴社の「自動化の成功」を全力でバックアップいたします。
No,445